The Life Like SW9/1200 has always been one of the more challenging N Scale locomotive to get a decoder into. No decoder has ever been made specifically for this model so it's been up to the modeler to fit in a wired decoder. I've done a number of these engines and over the years I updated my technique. What is shown below is the most reliable method that I have found.
Start by removing the fuel tank. Then each of the trucks can be removed by turning them as shown. Be careful not to bend the contacts that are attached to the body.

Next, remove the cab shell after unplugging the center hand rails from the cab. The heavy steel weight may come off as well and that is OK.
Some may feel that inside the cab would be the obvious place to put a decoder. I don't agree with that approach because this is where most of the weight is in this small engine. I have tested these with just the heavy steel weight removed and found that the engine lost much of it's traction and pulling power.
It is important to remove the shell without damaging those contacts that are attached to it. I made up a set of shims from .005 brass sheet. These are slipped between the frame and the body to prevent the contacts from catching on the frame.
Slip the shims carefully between the frame and the contacts where the contacts go between the frame and the body.
Once the shims are in place, the frame can be separated from the body by pressing the exposed part of the frame down as shown in this photo.
Once the shell and the frame have been separated, disassemble the frame to the point shown here.
Remove the LED and the resistor from the little PC board.

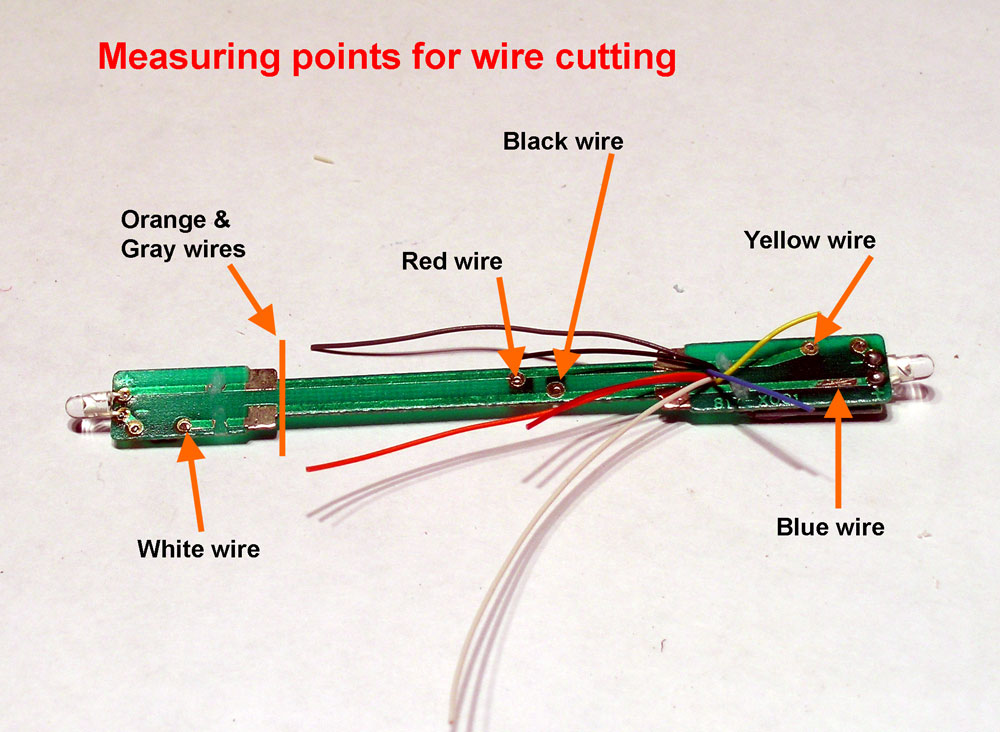
Cut the Train Control Systems Z2 decoder's wires to the following lengths:

Gray = 1-1/2 inch
Orange = 1-1/8 inch
All others = 1/2 inch
Strip 1/16 inch from the ends and then tin the ends of the Red, Black, Orange, and Gray wires. Remove the LED and resistor from the circuit board. Solder the red and black wires of the decoder to the points on the circuit board shown in this photo.

Then the decoder is attached to the PC board with a drop of Wathers Goo. It is positioned so that it is in the spot where the LED was. In this photo an original LED board is shown next to the board with a decoder mounted on it for comparison. The decoder is longer than the LED but is narrow enough to fit between the frame.
The Goo will need 12 to 24 hours to set and it's best to use a clamp of some sort to hold the position.

Once the Goo has set, the decoder / PC board should look like the one in the bottom of this photo. Remove the motor from the plastic saddle and then remove the brush contact clips. Cut them down to the shape shown in the photo and solder the gray and orange wires to them. Remember the orientation of the motor, the hole is towards the top.

With a jewelers file cut a groove down the left side of the motor just large enough to fit the orange wire into.
Then clip the orange wire to the top brush holder, and the gray wire to the bottom brush holder.
Lay the gray wire in the groove and wrap Kapton tape around the bottom of the motor so that it is covering the bottom brush holder and ends at the top of the motor on each side, which holds the gray wire in the groove.

Install the motor back in it's plastic saddle and then the frame can be re-assembled. Plug the LED board into it original spot. With a toothpick place a small amount of Goo between the motor and the plastic motor saddle on each side of the motor. Let it get tacky then press the motor wires into that spot.
The short white, yellow, and blue wires can be secured the same way as shown in the photo or they can be just cut off. I like to keep any unused wires on a decoder available in case they can be used in the future. As an example, I have re-used several decoders that had burned out motor outputs as lighting function decoders.
Almost done:
Check that the flywheel turns freely. Then test the mechanism by attaching alligator clips between a DCC source and each side of the frame. If that test good, then re-install the shell, the shims are not needed to re-install it. Install the trucks and fuel tank, then test again on the track. If that test good then re-install the weight and the cab and re-install the hand rails.