This how to page first appeared on my old web site in July of 2008. The CN type decoders were new then but have grown in popularity as they can be used in many engines.
Refer to the photo on the left.
This type of decoder uses two PC boards which take the place of the stock LED boards. As the front board does no have a connection to the left half of the frame, both boards are needed for the decoder to work. I really like the design of these decoders with the tiny but bright LED and large solder pads for the wires that make re-attachment possible.

For this installation I did not have to do anything to the frame. I started by disassembling the engine and mark the top of the motor. Lay the front board of the decoder out as shown in the photo on the left and cut the orange and gray wires to the lengths indicated in the photo.
Refer to the photo on the left.
Remove the brush caps from the motor, then remove the contact tabs from the brush caps. Solder the wires to the brush caps. File a slot on the left side of the decoder deep enough for a wire to fit but not all the way through the plastic motor housing. Re-install the brush caps, spring, and brush. The orange wire should lay in the slot as shown.
Wrap Kapton tape around motor as shown in photo on the left. Place motor, worm gears, and bushings into the left side of the frame. Take care to get the motor mounts seated correctly in the frame.
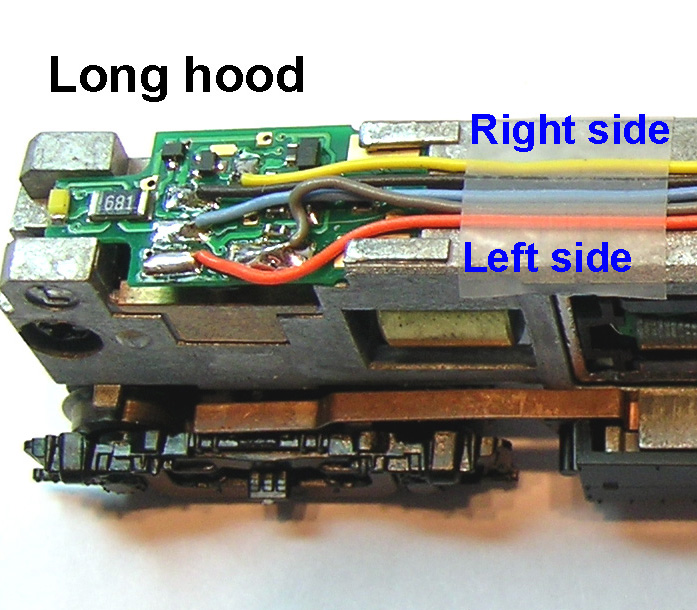
Assemble the frame again taking care to have the motor mounts properly seated. Check that the flywheels turn freely. Plug in the decoder boards and trim the black, blue, and yellow wires to a length that will reach the rear board then solder those to the pads indicated in the decoder instructions.
With this engine the way the shell sits on the on the frame leaves just enough space for the wires. The wires must lay flat on the top of the frame and must not overlap. Re-install the trucks and fuel tank.
At this point we are ready for a test run.
When satisfied with the test run without the shell, the shell can then be installed. If the shell is properly seated on the frame, the bottom of the walkways should make full contact with the 4 tabs that stick out on the sides of the frame.
In the photo on the left the trucks have been removed to make this more visible.
DONE !